
From Individuals to Densities: The Many Scales of Collective Control
In 1987, computer graphics pioneer Craig Reynolds created his celebrated “boids” model [9] that demonstrated how simple local rules can generate the complex flocking patterns that we observe in nature. What Reynolds perhaps may not have anticipated was how his work would inspire a mathematical revolution that now spans traffic optimization, social dynamics, epidemic control, financial markets, and swarm robotics. Building on Reynolds’ boids model, modern mathematicians now seek the ability to control collective dynamics for the use in a wide range of fields.
Controlling Collective Dynamics
The central challenge in controlling collective dynamics is inherently multiscale: how do we design strategies that account for individual behaviors while also achieving population-level goals? At the finest resolution, we track each agent explicitly, but at coarser scales, we describe the population through continuous densities or network-averaged fields. The mathematical journey from one extreme to the other is both conceptually rich and practically essential, as the choice of scale determines what computations are feasible at all.
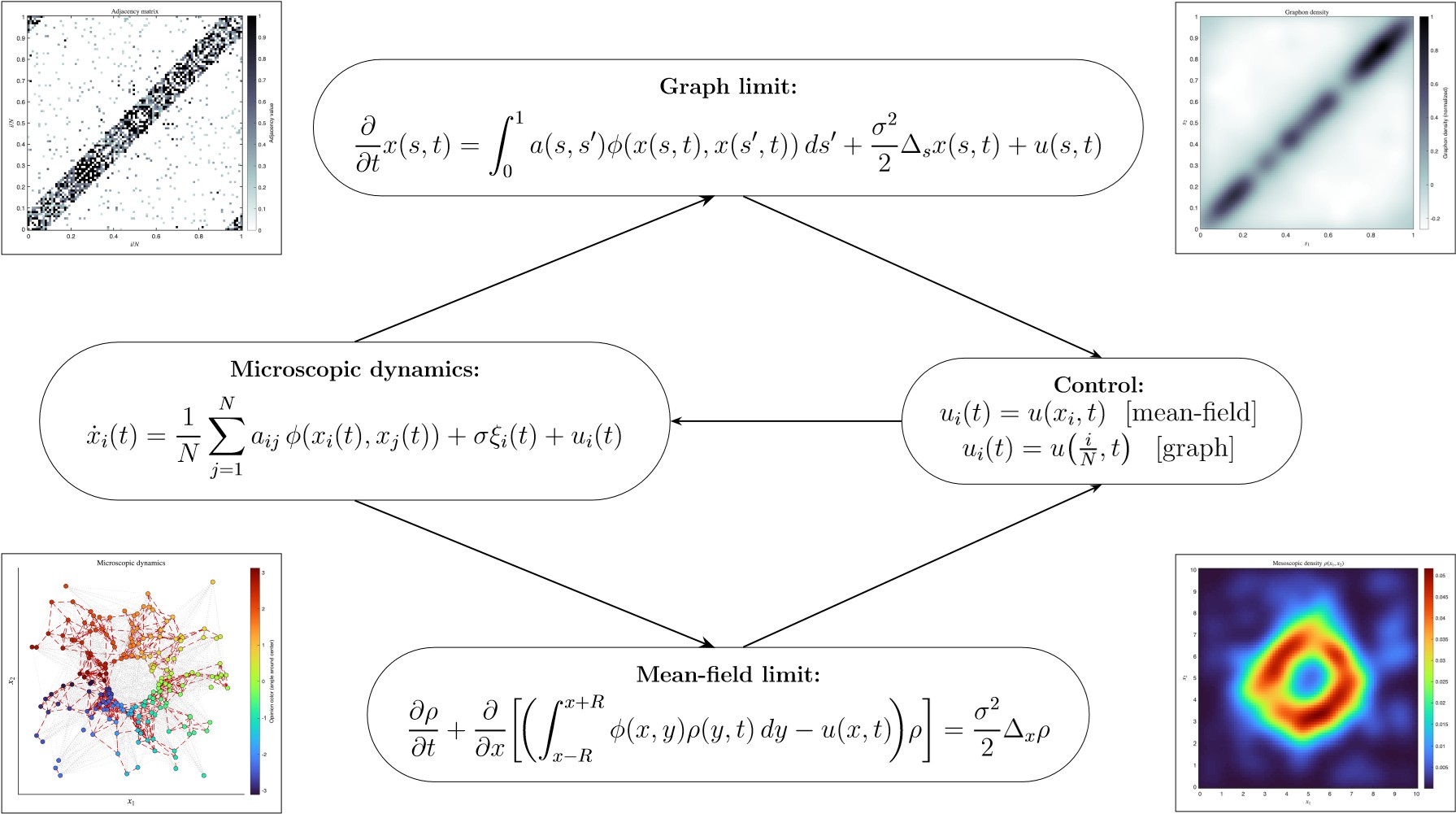
As a running example throughout this article, we reference the Hegselmann-Krause model for opinion dynamics [4], in which \(N\) agents each hold an opinion \({x_i}(t){\in}{\mathbb{R}^d}\) that evolves through interactions with their neighbors, random perturbations, and an externally applied control signal \({u_i}(t)\):
\[{\dot{x}_i}(t) = \frac{1}{N}{\sum^{N}_{j=1}}{a_{ij}}{\phi}({x_i}(t), {x_j}(t))+{\sigma}{{\xi}_i}(t)+{u_i}(t), \quad i=1, ..., N.\tag1\]
Here, \(\phi\) is an interaction kernel, \(a_{ij}\;{\geq}\;0\) encodes who influences whom, and \({\sigma}{{\xi}_i}(t)\) captures noise. A natural variant of this model incorporates bounded confidence: agent \(i\) only interacts with agents whose opinion lies within a radius \(R\) of its own. A typical control objective is consensus, where all agents are steered towards a target opinion \(x^*\) while simultaneously keeping the control effort small. This looks straightforward at small values of \(N,\) but the challenge grows quickly as the number of agents increases.
The Challenge of Scale
When \(N\) reaches into the thousands or millions—as is typical in crowd modeling, social networks, or swarm robotics—direct optimization of the agent-based system becomes computationally intractable. The optimization problem lives in \(\mathbb{R}^{Nd},\) and its complexity scales exponentially with \(N\): a system of 1,000 agents in two dimensions already poses a 2,000-dimensional problem, which standard numerical methods for optimal control simply cannot manage.
Beyond raw computation, two additional difficulties emerge. First, collective behavior often exhibits emergent properties—dramatic qualitative changes triggered by small perturbations in control signals—that are hard to anticipate from individual dynamics alone. The onset of consensus in an opinion model, the spontaneous formation of lanes in pedestrian flow, or the sudden polarization of a population can all arise from microscopic rules without any obvious macroscopic analog. The second difficulty stems from data collection. In practice, one rarely has access to the full state; sensors measure aggregate statistics rather than, e.g., the individual opinion of every single agent, and thus any realistic control architecture must operate from partial information.
These observations motivate a fundamental shift in perspective. Rather than tracking individuals, can we describe the distribution of agents and control that distribution instead? As \(N\) grows large, powerful mathematical limit theorems allow us to replace the high-dimensional discrete system with a tractable continuum description. Two distinct pathways can achieve this outcome, and each will preserve different structural features of the original problem. Understanding the relationship between these pathways is itself an active area of research.
The Graph Limit
The first pathway exploits the network structure encoded in the matrix \(a_{ij}.\) The graph limit procedure, formalized by Georgi Medvedev [5], assumes the existence of a continuous function \(a:[0,1]^2{\rightarrow}\;\mathbb{R},\) called a graphon, such that \(a(i/N,j/N)=a_{ij}.\) This assumption embeds the discrete interaction matrix into a smooth object on the unit square. As \(N{\rightarrow}{\infty},\) the system \((1)\) converges to the graph limit equation
\[\frac{{\partial}x}{{\partial}t}(s,t)={\int^1_0}a(s, s')\;{\phi}(x(s,t),\;x(s',t))\;ds'\;+\frac{{{\sigma}^2}}{2}{{\Delta}_s}x(s,t)+u(s,t), \tag2\]
where the discrete label \(i\) has been replaced by a continuous label \(s\in[0,1].\) The transformation is a systematic averaging: the Riemann sum over \(j\) becomes an integral over \(s'\) while the \(N\)-dimensional system collapses to a single nonlinear integro-differential equation in infinite dimensions. Without noise \((\sigma=0),\) \((2)\) reduces further to a nonlocal ordinary differential equation, which is substantially easier to optimize over than the original agent-level formulation.
The graph limit is particularly natural when the network has identifiable macroscopic structure: spatial proximity graphs, hierarchical organizations, or graphs that approximate a smooth kernel. For opinion dynamics with spatially distributed agents, the graphon \(a(s,s')\) can capture how the strength of influence decays with the distance between agent labels, carrying the essential geometry of the interaction network into the continuum formulation.
The Mean-field Limit
The second pathway takes a statistical mechanics perspective; rather than labeling agents by their position in a network, we ask how many agents occupy each opinion at time \(t.\) As \(N\rightarrow\infty,\) under mild conditions on the interaction kernel and the initial distribution, the empirical measure \({{\mu}_N}=\frac{1}{N}{\sum_j}{\delta_{x_j(t)}}\) converges to a deterministic density \(\rho(x,t).\) The controlled mean-field limit equation for the Hegselmann-Krause model takes the form of a controlled Fokker-Planck equation:
\[\frac{{\partial}{\rho}}{{\partial}t}+\frac{\partial}{{\partial}x}\biggl[\bigg(\int^{x+R}_{x-R}\phi(x,y)\;\rho(y,t)\;dy-u(x,t)\bigg)\rho\biggl]=\frac{{\sigma}^2}{2}\frac{{\partial}^{2}{\rho}}{{\partial}x^2},\tag3\]
where the control has become a function \(u(x,t)\) of opinion and time, rather than a separate signal for each agent. The optimization problem now reads as follows: minimize the expected distance to consensus, integrated over the density and subject to the partial differential equation (PDE) in \((3)\). The dimensionality has dropped from \(N{\cdot}d\) to simply \(d\) plus time.
This formulation opens the door to the well-developed toolkit of PDE-constrained optimal control: adjoint methods, Pontryagin’s maximum principle in infinite dimensions, and Hamilton-Jacobi-Bellman (HJB) equations. An important subtlety is that while the microscopic dynamics are linear in the original control problem, (3) involves a bilinear coupling between \(u\) and \(\rho\) which introduces genuine nonlinearity and raises interesting questions about stabilizability and controllability of the resulting system [2, 3].
Connecting the Scales
The graph limit and the mean-field limit are not competing descriptions but complementary ones, related through a hierarchy of scales illustrated in Figure 1. In a precise sense, the mean-field equation \((3)\) is more general; the solution to the graph limit equation \((2)\) can be recovered from the mean-field density by a procedure known as the hydrodynamic limit, which extracts macroscopic flow fields from the kinetic distribution. For this reason, the mean-field level is often called the mesoscopic scale (intermediate between individual agents and bulk flow), while the graph limit corresponds to the macroscopic scale in the same sense as Euler equations in fluid dynamics [7].
Beyond First-order Models: Kinetic Equations
Many collective phenomena—including opinion polarization, bird flocking, and vehicle platooning—are more accurately described by second-order microscopic models, wherein the agent’s state is represented by a position-velocity pair [6]. The mean-field limit of this second-order system yields a kinetic equation for the phase-space density \(f(x,v,t)\) of agents at position \(x\) with velocity \(v,\) i.e., a controlled Fokker-Planck equation in the joint \((x,y)\) space.
A particularly elegant route to these kinetic equations passes through binary interactions [8]. At the microscopic level, two agents with velocities \(v\) and \(v_*\) interact stochastically, exchanging momentum according to a rule that incorporates alignment, a control term, and noise. Designing the control at this binary level amounts to solving a small two-agent optimization problem with an explicit solution. One then applies a scaling limit that sends the interaction strength to zero while increasing the collision rate — a procedure analogous to the grazing collision limit in kinetic gas theory [10]. The resulting continuum equation is the controlled Fokker-Planck PDE, now derived from first principles of the microscopic interaction rule rather than postulated directly. This derivation provides a rigorous foundation that connects the binary level with the continuum, clarifying exactly how the macroscopic control term \(U[f](x,v,t)\) inherits its structure from the microscopic design choices [1].
Closing the Loop: From Densities Back to Agents
A control law \(u(x,t)\) that is derived at the continuum level must ultimately be translated into commands for actual agents. The simplest approach is direct substitution. If the control law was derived at the mean-field level, agent \(i\) receives the command \(u_i(t)=u(x_i(t),t),\) which involves evaluating the continuum policy at the agent’s current opinion. If the control was instead derived at the graph limit level, then the natural substitution is \(u_i(t)=u(i/N,t),\) which involves evaluating the graphon-based policy at the agent’s label rather than its state. This framework is computationally cheap and requires no inter-agent communication. Crucially, the resulting microscopic strategy is expressed in feedback form: each agent continuously observes its own state and adjusts accordingly, even though the mean-field optimization was originally posed as an open-loop problem over the density. This feedback structure is a valuable byproduct of the mean-field approach.
More sophisticated methods account for finite-size effects. Rather than applying the continuum law blindly, one can correct each agent’s command by its deviation from the current population mean, thereby explicitly compensating for the unavoidable fluctuations when \(N\) is only moderately large. At the other end of the complexity spectrum, particle-filter methods maintain an approximate representation of the optimal density and adapt commands in real time as the empirical distribution evolves; these methods provide robust performance guarantees but at a significantly higher computational cost.
The approximation error between continuum-derived and optimal agent-level strategies is possible to rigorously quantify. Under standard regularity assumptions, the suboptimality of the mean-field control policy that is applied to the finite-agent system scales as \(O(N^{-1/2}),\) which is a direct consequence of the central limit theorem that governs the convergence of empirical measures. This scaling provides theoretical justification of the entire multiscale program: for large \(N,\) solving a PDE-constrained optimization problem and reading off individual commands is both computationally far cheaper than the \(N\)-agent problem and nearly optimal in performance. The mean-field approach thus provides a principled and quantifiably accurate shortcut through an otherwise intractable optimization landscape.
Open Problems and Outlook
The control of collective dynamics sits at the intersection of several rapidly developing fields, and many fundamental questions remain. On the theoretical side, the controllability of bilinear PDE systems such as \((3)\) is not fully understood: standard results for linear systems do not transfer, and the nonlinear coupling between the density and the velocity field creates genuine obstructions. Questions also surround the metastability of equilibria in nonlocal Fokker-Planck equations and the related design of controls that steer the system away from undesired steady states and towards a target distribution, posing subtle challenges that extend well beyond classical stabilization theory.
On the computational side, solving the HJB equation that is associated with mean-field optimal control in high state dimensions remains a frontier problem. The value function lives on the space of probability measures—which is an infinite-dimensional object—and any tractable numerical method must introduce a finite-dimensional approximation. Tensor decomposition methods, deep learning approximations of the value function, and physics-informed neural networks are all active research directions, each with their own tradeoffs between accuracy, scalability, and generalizability.
Applications provide equally rich challenges. Social dynamics on real-world graphs, which are neither sparse nor graphon-convergent in any obvious sense, require new theoretical frameworks that can accommodate power-law degree distributions, community structure, and time-varying topology. Inverse optimal control in behavioral ecology—i.e., inferring the implicit objective that is being optimized by a flock of birds or school of fish from trajectory data—connects the forward problem discussed here to statistical inference and machine learning. At a very different scale, real-time feedback control of fusion reactor plasmas draws on the same mathematical infrastructure: a high-dimensional particle system whose continuum limit is a kinetic PDE, controlled under tight time constraints and subject to hard physical bounds.
What unites these problems is the same multiscale intuition that Craig Reynolds encoded in boids nearly four decades ago. Complexity at the individual level can organize into simplicity at the population level, and that simplicity is where tractable mathematics lives.
References
[1] Albi, G., Bicego, S., & Kalise, D. (2025). Control of high-dimensional collective dynamics by deep neural feedback laws and kinetic modelling. J. Comput. Phys., 539, 114229.
[2] Albi, G., Choi, Y.P., Fornasier, M., & Kalise, D. (2017). Mean field control hierarchy. Appl. Math. Optim., 76(1), 93-135.
[3] Bicego, S., Kalise, D., & Pavliotis, G.A. (2025). Computation and control of unstable steady states for mean field multiagent systems. Proc. R. Soc. A, 481(2311).
[4] Hegselmann, R. & Krause, U. (2002). Opinion dynamics and bounded confidence models. J. Artif. Soc. Simul., 5(3), 1-33.
[5] Medvedev, G.S. (2014). The nonlinear heat equation on dense graphs and graph limits. SIAM J. Math. Anal., 46(4), 2743-2766.
[6] Motsch S., & Tadmor, E. (2014). Heterophilious dynamics enhances consensus. SIAM Rev., 56(4), 577-621.
[7] Paul, T., & Trélat, E. (2022). From microscopic to macroscopic scale dynamics: Mean field, hydrodynamic and graph limits. Preprint, arXiv:2209.08832.
[8] Pareschi, L., & Toscani, G. (2013). Interacting multiagent systems: Kinetic equations and Monte Carlo methods. Oxford, U.K.: Oxford University Press.
[9] Reynolds, C.W. (1987). Flocks, herds and schools: A distributed behavioral model. Comput. Graph., 21(4), 25-34.
[10] Villani, C. (1998). On a new class of weak solutions to the spatially homogeneous Boltzmann and Landau equations. Arch. Ration. Mech. Anal., 143(3), 273-307.
About the Authors
Giacomo Albi
Associate professor, University of Verona
Giacomo Albi is an associate professor of numerical analysis at the University of Verona. His research focuses on numerical methods for partial differential equations, optimal control of high-dimensional systems, and kinetic modeling of multi-agent systems. He is principal investigator of the project "Data-driven discovery and control of multi-scale interacting artificial agent systems" co-funded by MUR and NEXTGenerationEU.

Dante Kalise
Associate professor, Imperial College London
Dante Kalise is an associate professor in computational optimization and control at Imperial College London. He also serves as the program director and SIAM News activity group liaison for the SIAM Activity Group on Control and Systems Theory.

Emmanuel Trélat
Professor, Sorbonne Université
Emmanuel Trélat is a professor at Sorbonne Université and serves as the director of Laboratoire Jacques-Louis Lions. He is an expert of control in finite and infinite dimensions.

Related Reading

Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
