
From Inside-out Umbrellas to Soft Robotics
Umbrellas are a useful invention with a tragic flaw: In a strong wind, they can turn inside-out, drenching their user and defeating their entire purpose. In scientific terms, the right-side-out and inside-out configurations are known as elastic instability, with two states that umbrellas spontaneously—and unfortunately—transition between under certain conditions.
But what if we could control that transition? For umbrellas, turning inside-out is undesirable, but for elastic valves in fluid environments it could prove useful. Finding a way to cause spontaneous snaps between stable configurations would mean that changing the flow of a fluid would no longer require mechanical intervention. As researchers develop soft hydraulic robots and other systems that require sensitive, passive control of fluids, the need for such devices increases.
“In general, we try to avoid elastic instabilities,” Matteo Pezzulla, a mechanical engineer at Århus University in Denmark, said. However, he and his colleagues realized that if they could control how an elastic system snaps between configurations, it could lead to a new type of valve. “We wanted a sharp, fast change in the geometry of the channel [where fluid is flowing]. Having something that snaps sounded appealing to us because we could trigger a sudden change in the geometry of the channel just by increasing the fluid flow.”
In their study, published in Physical Review Letters late last year [1], Pezzulla and his collaborators combined desktop-sized experiments with mathematical modeling to understand how elastic spherical shells snap when embedded in a viscous liquid. They found the threshold for elastic instability, as a function of (i) the geometry of the fluid channel; (ii) the shape and properties of the valves; and (iii) the material properties for the fluid and shells — all of which can be applied to soft robotics and similar fine-control hydraulic systems.
Scientific Progress Goes POP!
Although bistable elastic systems do exist in nature (for example, plant leaves that collect water until they reach a maximum amount at which time they dump their contents onto the heads of unsuspecting passersby), that isn’t precisely what the researchers were looking for.
“When we look at these kinds of problems, we are inspired by plants and fungi, [which] do a magnificent job in passively controlling fluid flow,” Pezzulla said, though he noted vascular systems do not seem to involve elastic instabilities.
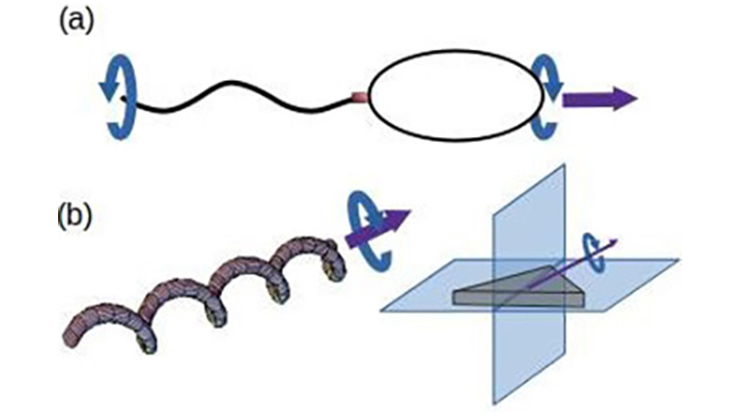
Pezzulla’s scientific inspiration partly came from a common toy known as a popper, which consists of a simple rubber suction cup; after inverting the cup and placing it on a table, it will spontaneously return to its original shape with a popping sound and fly into the air. However, the transition between states of the popper is mechanically driven rather than fluid. Combining the biological with the mechanical led to the umbrella instability, where forces exerted by fluid lead to the spontaneous snapping between configurations.
To simplify the physical system, the researchers used a viscous fluid with no turbulence — contrary to the classical umbrella inversion problem, which can be very turbulent. In physics terms, this is quantified by a dimensionless parameter known as the Reynolds number:
\[\textrm{Re} =\frac{2R_c\rho\bar{U}}{\mu}\]
where \(R_c\) is the radius of the (cylindrical) flow channel, \(\rho \) is the fluid density, \(\bar{U}\) is the average fluid velocity, and \(\mu\) is the dynamic viscosity. Large Reynolds numbers (i.e. \(\textrm{Re}>10^{3}\)) describe undesirable turbulent flow, while very small values (i.e. \(\textrm{Re}<1\)) mean that viscous forces dominate over the inertia of the fluid — which is a very simple system both mathematically and physically. For water at room temperature, \(\rho\approx10^{3}\;\textrm{kg/m}^3\) and \(\mu\approx10^{-3}\) \(\textrm{Pa}{\cdot}\textrm{s}\), which will only produce low Reynolds numbers under strict conditions. A better approach for soft hydraulic systems involves choosing a fluid with much higher viscosity.
A second dimensionless parameter is the Cauchy number \(C_Y\), which is the ratio of the stress exerted by the fluid to the elastic properties of the material:
\[C_Y = \frac{\mu\bar{U}r^2}{B},\]
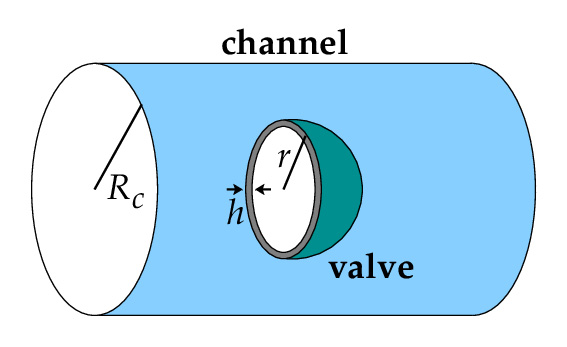
where \(r\) is the radius of the spherical shell and the bending stiffness of the shell material
\[B= \frac{2Eh^3}{\sqrt{3(1-{\nu}^2)}}.\]
This quantity includes the Young’s modulus \(E\) that measures how a material responds to stresses, and Poisson’s ratio \(\nu\approx0.5\) for rubber-like materials that don’t compress under stress. The thickness of the shell \(h\ll{r}\) is the final geometric property (see Figure 1).
However, because it involves the fluid properties as well as valve properties, the Cauchy number is not simply set by choosing the right material for the valve: it must take the entire system into account. To get the factors right, the researchers performed numerical simulations that would allow them to pick the ideal fluid and valve materials. After all, a workable valve should not break or buckle instead of snapping, nor should it flutter or open too easily under pressure.
“When the Cauchy number is very high, the shell is going to deform quite substantially,” Pezzulla said. “When it’s very small, the shell is rigid.”
The only dynamic quantity at fixed temperatures is the fluid velocity in the linear low Reynolds number regime, which can be controlled experimentally — exactly what the researchers wanted. In other words, they sought both mathematically and experimentally to find the critical Cauchy number \(C^{\textrm{crit}}_Y\) at which the spherical shell flips itself inside-out and does not snap back even if the flow is reduced to zero (think of it like an umbrella that flips inside-out hard enough to break). By calculating this quantity, researchers could design a valve that would allow the system to reliably snap between states without breaking, providing passive control for the fluid.
From Tubes to Soft Robots
With this model of fluid-valve interactions in hand, the researchers selected silicone oil for their fluid — which, despite being almost a thousand times more viscous than water, has a comparable density. They also chose vinyl polysiloxane for the elastic valve material with various coatings to test different tensile strengths under experimental conditions.
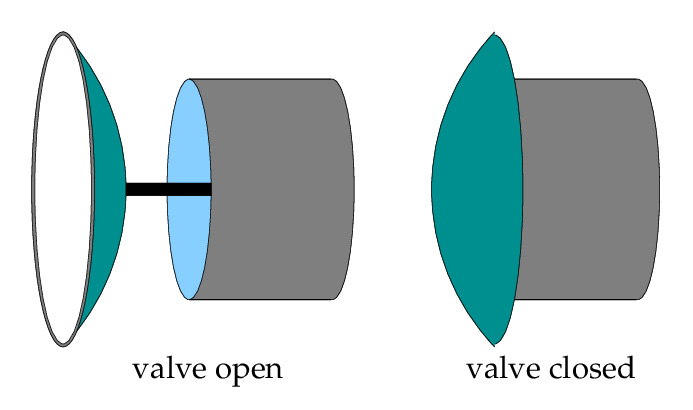
The experiment itself utilized coaxial acrylic cylinders between 10 and 21 millimeters in radius, with the valve sitting in front of the inner tube. With the shell in its initial state, the fluid could enter the inner channel, but when snapped into its inverted state, it would close off that tube, thus reducing the total fluid flow and increasing the flow resistance.
“We like to do experiments at the desktop scale,” Pezzulla said. “If you have a laser cutter, a pressure sensor, and a syringe pump, you can make it work. If you can tune flow rates and pressures periodically, you can create motion.”
Since the only thing governing whether the valve is open or closed is the fluid pressure on it, the entire system is passive, not requiring electronic control or human intervention. That in turn reduces the complexity of soft hydraulic apparatus which could be used for small robots.
“In soft robotics you don’t have rigid tubes or valves,” Pezzulla said. “If you have a soft robot, at some point you want to reduce the flow inside or towards a certain appendage like a leg or an arm, this is going to reduce the flow rate inside that appendage to reduce its motion. You increase the pressure asymmetrically only on one side, so [the limb] is going to bend, and if you reduce it, it’s going to go back to its straight configuration.”
The researchers constructed their mathematical model governing the system to be dimensionless, as an experimental setup should scale up or—more importantly for soft robotics—down without affecting the general conclusions. In practice, however, microscopic material properties such as fluid-surface interactions change at smaller length scales. Additionally, Pezzulla and his collaborators used rigid acrylic cylinders, but since soft hydraulic systems must be able to flex without rendering the valves useless, their next steps for the project are to change out the rigid cylinders.
“We like to do math, but we have to be honest about the limitations of the work,” Pezzulla said. “So far, these experiments have only been possible at the desktop scale. I think that would be really, really nice if we can scale them down by at least a factor of 10 or 100.”
The figures in this article were provided by the author.
References
[1] Ledda, P.G., Garg, H., Østergaard-Clausen, V., Rudzki, L.K., Madary, A., & Pezzulla, M. (2025). Fluid-induced snap-through instability of spherical shells. Phys. Rev. Lett., 135, 234002.
About the Author
Matthew R. Francis
Science writer
Matthew R. Francis is a physicist, science writer, public speaker, educator, and frequent wearer of jaunty hats. His website is https://bowlerhatscience.org.
Related Reading
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
