
Symmetry and Polar Decomposition by Mechanics
There are several mechanical or geometrical interpretations of the symmetry of a matrix; I would like to describe one that recently occurred to me. It is likely that others have thought of it before, though I did not do a literature search to confirm.
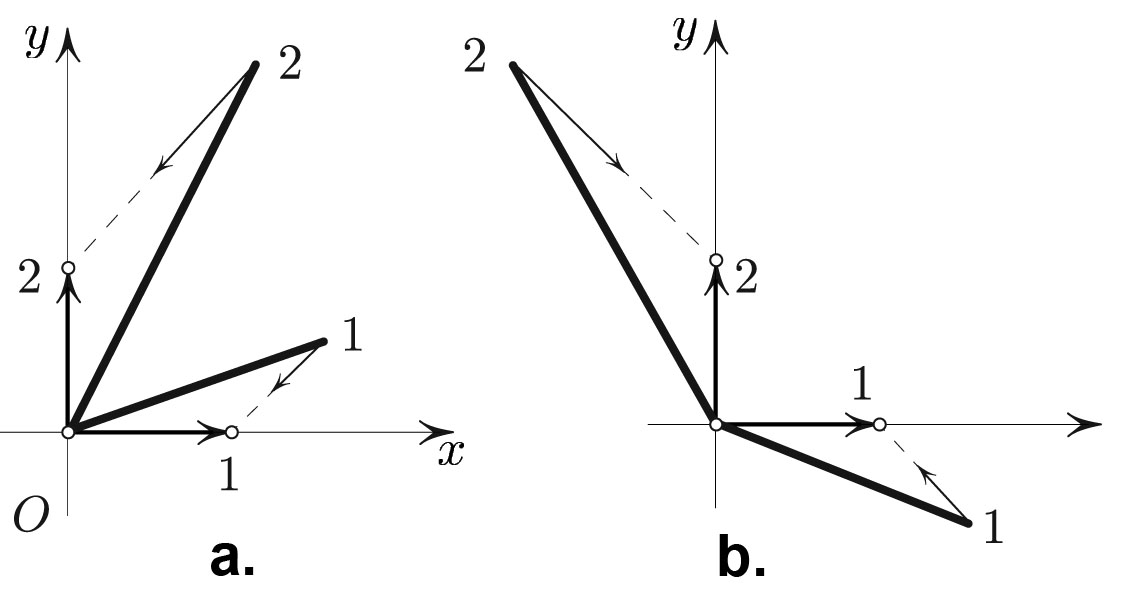
Claim 1: An \(n \times n\) \((n\geq 2)\) matrix is symmetric if and only if the aforementioned mechanical system is in equilibrium.
Indeed, in an equilibrium state the torque around \(O\) in any \(ij\)-coordinate plane vanishes; this amounts to \(a_{ij}-a_{ji}=0\).
Claim 2: A matrix is positive-definite if and only if the frame is right-handed and in a stable equilibrium.
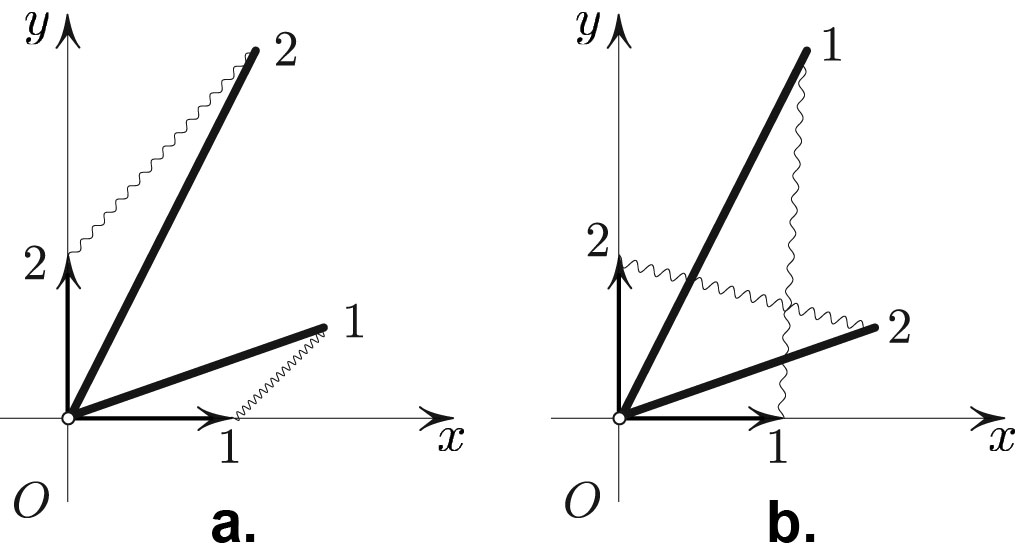
The proof of this claim in dimension \(2\) is almost purely geometrical. Figure 2 illustrates stable equilibria with the positively-oriented frames. No combination of quadrants other than those in Figure 2 can occur.
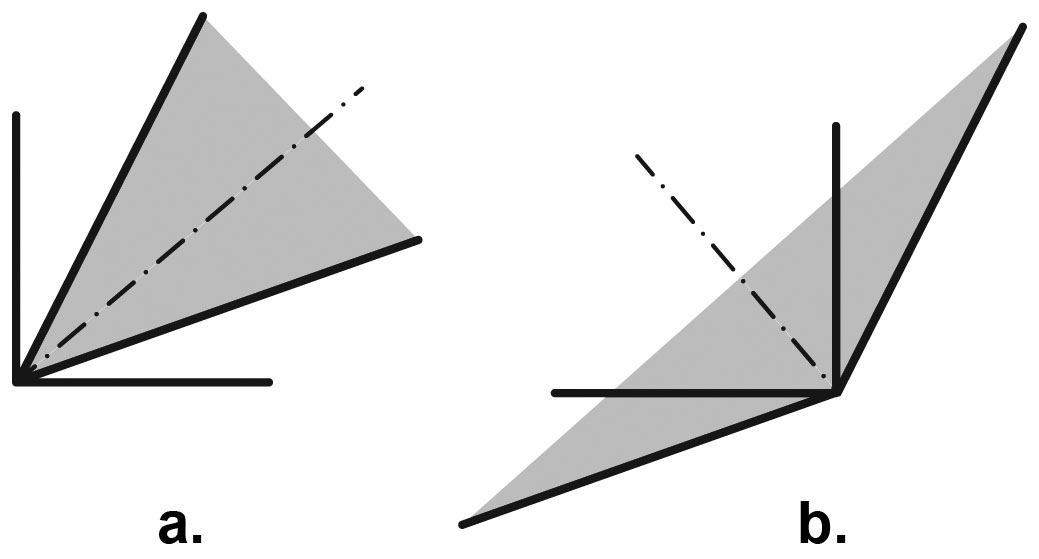
It is clear that both eigenvalues are positive in either case. Indeed, with \(QN\) denoting the \(N\)th quadrant, we have (see Figure 3)
\[ A(Q1)\subset Q1 \ \ \ \hbox{and} \ \ \ A(Q2) \supset Q2 \]
for matrix \(A\) in Figure 2a. We use the fact that the matrix maps the basis \(\boldsymbol{e}_1, \boldsymbol{e}_2\) to the frame \(\boldsymbol{a}_1, \boldsymbol{a}_2\). According to a fixed point theorem, \(Q1\) and \(Q2\) both contain eigenvectors with positive eigenvalues. We treat the matrix in Figure 2b similarly, with the same conclusion of two positive eigendirections. By contrast, Figure 1b depicts a negatively-oriented frame, and we have \(A(Q2)\supset Q4=-Q2\) for the corresponding matrix \(A\); this implies the existence of a negative eigenvalue.
Connection to the Toeplitz Norm
Potential energy of the system in Figure 1 is a mechanical interpretation of the Toeplitz norm \(\Vert A- I\Vert ^2\), up to a constant factor that depends on Hooke’s constant. We recall that the Toeplitz norm of a square matrix \(X\) is defined as the root of the sum of its elements’ squares: \(\Vert X\Vert^2=\text{tr}(X^TX)\).
Polar Decomposition
Given an arbitrary \(n \times n\) matrix \(A\) that is not necessarily symmetric, let us connect the frame of columns to the springs—as in Figure 1—and then release. After undergoing a rotation \(R\in SO (n)\), the frame will settle (assuming some damping) to the orientation of least potential energy; this new frame corresponds to a symmetric matrix \(S\). In short, \(S=RA\), i.e., \(A = R ^{-1} S \), which almost amounts to the polar decomposition of \(A\). The “almost” is due to the fact that \(S\) need not be positive definite, as Figure 1b illustrates; one must first compose \(A\) with an extra reflection if \(\text {det}\: A< 0\), and then carry out the above operation.
Sylvester’s Criterion
Sylvester’s criterion is a necessary and sufficient condition for the positivity of a symmetric matrix that requires all principal minors to be positive. Minimality of the Toeplitz norm \(\Vert A- I\Vert ^2\) for positive definite \(2 \times 2\) matrices makes Sylvester’s criterion visually transparent. For example, if the Toeplitz norm is minimal for a positively-oriented frame, only two cases of the equilibria shown in Figure 2 can occur; \(a_{11}>0\) in both of these cases. Finding a purely visual proof of Sylvester’s criterion for \(n=3\) in a similar spirit is left as a challenge.
The figures in this article were provided by the author.
About the Author
Mark Levi
Professor, Pennsylvania State University
Mark Levi ([email protected]) is a professor of mathematics at the Pennsylvania State University.
Stay Up-to-Date with Email Alerts
Sign up for our monthly newsletter and emails about other topics of your choosing.
